Smart agriculture is a new form of agriculture that leverages robots, AI, IoT, and other advanced technologies, with the aim of saving labor, increasing efficiency, achieving high-quality production, and reducing environmental impacts based on highly analyzed agricultural data. The term became widely known during the 2000s. Smart agriculture has evolved in various ways since then, and demonstration experiments of remote monitoring and operation of robotic agricultural machinery on virtual farms are now underway. Hopes are high that it will become the future of agriculture, because simulating crop growth conditions makes it possible to predict yields and the timing of harvests, thereby optimizing work plans.
Special Feature 1 – The Agricultural Revolution The evolution of smart agriculture:
Farming in virtual spaces
composition by Takeaki Kikuchi

Noboru Noguchi
Dean of the Research Faculty of Agriculture, Graduate School of Agriculture, and School of Agriculture, Hokkaido University
Graduated from the Department of Agricultural Engineering at Hokkaido University’s Faculty of Agriculture in 1985. In 1990, he completed the doctoral program at that university’s Graduate School of Agriculture. He then served as an research assistant at the Faculty of Agriculture and assistant professor at the Graduate School of Agriculture before being appointed professor at the Research Faculty of Agriculture in 2004. He has held his current post since 2023.
Attention is focusing on smart agriculture, which employs technologies such as the Internet of Things (IoT) and AI. It has three key features. First, it will enable labor shortages to be addressed and liberate people from grueling physical work by promoting automation and robotization. Second, leveraging data will facilitate efforts to pass on agricultural skills, as well as achieving more advanced risk management and optimizing production management. Finally, making work operations ultraprecise will enable smart agriculture to contribute to the sustainability of the environment and food production by reducing the volume of agrochemicals and chemical fertilizers used and lowering the cost of production.
AI analysis of big data
Human society has evolved as follows: (1) hunting society –> (2) agrarian society –> (3) industrial society –> (4) information society. Today, we live in an information society called Society 4.0, but in Society 5.0, cyberspace (virtual space) and physical space (real space) will be integrated, with people and things connected, and knowledge and information shared. For 12,000 years, farming has taken place in physical spaces alone. However, smart agriculture in Society 5.0 will involve using AI to analyze accumulated big data in cyberspace and then leveraging it in physical spaces.
For example, there is the automation and robotization of agricultural machinery using Global Navigation Satellite Systems (GNSS: the generic term for navigation satellite systems such as the U.S. GPS) (Figure 1). Level 1 automated machinery emerged in the form of tractors fitted with automatic steering functions that use GNSS. While these tractors still require a human to sit in the driver’s seat, they allow for hands-free driving. In other words, even someone who lacks the skill to operate the tractor can make it move and carry out agricultural tasks just by riding in the tractor. In the U.S., around 80% of farmers already use Level 1 tractors. The next stage up is Level 2, involving the introduction of robotic agricultural machinery with automated driving functions; machines that can operate and plow fields unmanned. In 2018, a Japanese manufacturer was the first in the world to launch commercial sales of a robot tractor. There is no need for a person to ride in such agricultural machinery; they simply need to monitor the work from nearby. Alternatively, a two-machine configuration can be used, with an unmanned machine at the front and a manned one at the back (or vice versa), enabling them to perform cooperative work. For example, the machine at the front might till the soil, while the one at the back sows seeds or spreads fertilizer. In other words, one person can operate two machines.

Figure 1. Technology levels of robotic agricultural machineryLevel 1 machines had automatic steering, but a human was required to be on board. Following the evolution to Level 2 machines, which are capable of unmanned operation, research and development has been progressing with a focus on Level 3 technology, which is remotely monitored and operated.
Nevertheless, having one person operate two machines is not enough. Accordingly, Level 3 technology is being developed, in the form of robotic agricultural machinery capable of being remotely monitored and operated. The monitoring and operation of robotic agricultural machinery is carried out in a monitoring room set up in a location away from the farm (Figure 2). We have set up a monitoring room at Hokkaido University’s Smart Agriculture Education and Research Center, and have succeeded in remotely monitoring and simultaneously operating up to six robotic agricultural machines. The fields where they worked included some located as far as 600–700 km away, but these machines were able to carry out fully automated agricultural tasks under remote monitoring, even in such distant locations.
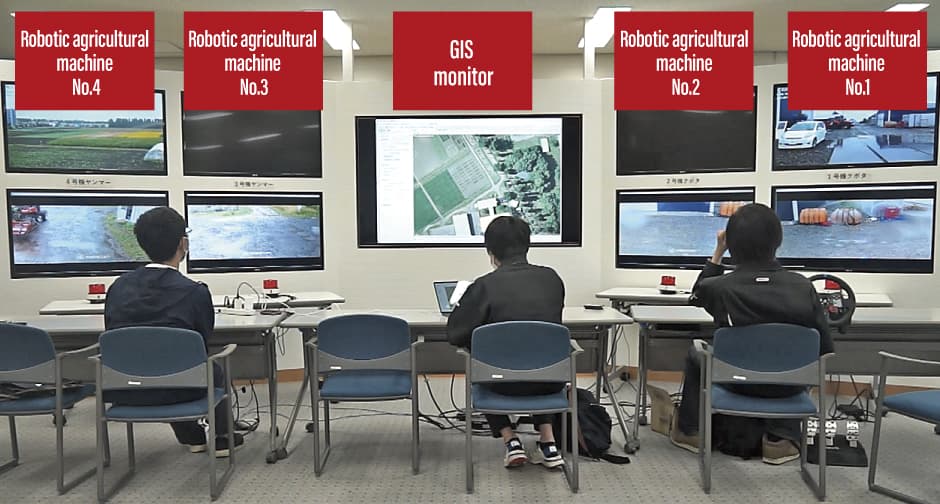
Figure 2. Remote monitoring of four robotic agricultural machinesMonitoring of work in four fields from the remote monitoring room at Hokkaido University. Each set of two monitors arranged one above the other shows video of the robotic agricultural machine’s surroundings and the area in front of it. The central monitor is a Geographic Information System (GIS) that monitors the speed and work status of the robotic agricultural machinery.
Detecting obstacles and estimating their distance
Ensuring safety is the most crucial challenge when it comes to remotely monitored robotic agricultural machinery. Accordingly, two full-HD cameras are fitted to these machines, one at the front and one at the back; based on the video images sent back to the monitoring room, AI automatically detects obstacles in front or behind the machines, enabling them to be slowed down or brought to an emergency stop. Conventional internet is not always able to handle this exchange of information, since delays in video transmission occur when the network is congested. Delays of as much as three seconds can actually occur, which means that the AI in the monitoring room analyzes video from three seconds earlier. As low-latency, high-speed, high-capacity connections are essential to prevent such situations, telecommunications companies are also involved in the development of Level 3 robotic agricultural machinery.
Furthermore, to mitigate video delays, not only is monitoring carried out by AI and humans in the monitoring room, but the machines themselves are also equipped with functions for detecting obstacles and avoiding collisions. Fitted with sensors called 2D LiDAR that uses laser technology, the agricultural machinery can detect the presence of obstacles and the distance to each obstacle based on information captured by the sensors, and either sound an alarm or bring the machinery to an emergency stop. Legal frameworks are also being developed to address unmanned robotic agricultural machinery driving on public roads. Applications have already been made based on the results of pilot trials on public roads, and it seems likely that prefectural public safety commissions will approve specified automated operation for movement between fields or between machinery sheds and fields.
In actual agricultural work, robotic agricultural machinery will also need to operate under windbreaks and the like. GNSS cannot be used in such situations. There are also other situations in which autonomous driving is unfeasible, such as passing other agricultural machinery or light trucks on narrow farm roads. Level 3 machinery is designed to be able to switch immediately from automated driving to remotely operated driving in such situations. The monitoring room is equipped with a steering wheel and other controls synchronized with the agricultural machinery, enabling the person in the monitoring room to operate the machinery while viewing the images projected onto the monitoring screen. We were given the opportunity to showcase the outcomes of our work on remote operation at Expo 2025 Osaka Kansai. Having linked up the Expo venue with an agricultural site belonging to Hokkaido University, we had people remotely operate the university’s robotic agricultural machinery from the Expo venue, about 1,200 km away. Installing remote monitoring and operation systems in robotic agricultural machinery will significantly improve the efficiency of agriculture. In a pilot trial, working hours were cut by 69% and production costs by 16%, achieving a 25% increase in profit.
Smart agriculture is being pursued not only in rice production but also in the cultivation of fruit trees and vegetables. First, sensor-equipped drones are used to gather information. Once a week, they carry out growth modeling, predictive detection of pest and disease outbreaks, and position estimation of fruit trees and vegetables. AI analyzes this information and optimizes management operations. It forecasts the best time for harvesting and creates a projected yield map. The robotic agricultural machinery then harvests and transports the produce.
Remotely monitored and operated robotic agricultural machinery performs harvesting
In the field where we are conducting experiments with pumpkins, we are growing three varieties —— Korinki, Oitokekuritan, and Ebisu —— from seeds sown randomly. We fly drones over the field to collect data. AI analyzes the data based on the detection algorithm and identifies the variety of each specific pumpkin, determining whether it is Korinki, Oitokekuritan, or Ebisu. The accuracy rate is in excess of 90%. In addition, the AI estimates quality and yield, and assists in formulating an appropriate shipment plan.
Pumpkins are heavy, so a large number of people are needed to harvest them. In addition, the yield is unclear until they are actually picked, so it is not possible to tell how many trucks are needed to transport them. Under the current situation, where the yield is unknown until the day of harvesting, it is difficult to load the pumpkins efficiently. If the yield can be forecast accurately through smart agriculture, transport will become more efficient. Not only will this make it possible to minimize expenses, but it will also alleviate the impact on the global environment by reducing carbon dioxide emissions from trucks.
The produce is actually harvested by remotely monitored and operated robotic agricultural machinery. As we have a precise understanding of the location of each pumpkin thanks to the data gathered by drones, there is no need for visual inspection. In other words, harvesting can be carried out at night. However, when it comes to the actual harvesting process, it currently takes quite a bit of time to pick a single pumpkin. On top of that, the machinery sometimes fails if it gets tangled up in the vines. But failed harvests are logged, so a worker can collect those pumpkins the next day.
In Urausu Town, Hokkaido, and Anamizu Town, Ishikawa Prefecture, we are undertaking experiments to make the cultivation of wine grapes smarter. The important thing when harvesting grapes is determining whether or not it is time to pick them, based on whether they have the appropriate sugar content and acidity for winemaking. When humans harvest grapes, they visually inspect them and then taste individual grapes to decide whether they are ready. In smart agriculture, AI makes the decision based on visual information (Figure 3). The wavelength of light visible to the human eye generally ranges from 380 to 780 nm, but if advanced sensors are used, wavelengths up to around 1,500 nm can also be investigated, making it possible to obtain information about sugar content and acidity that cannot be captured with visible light.
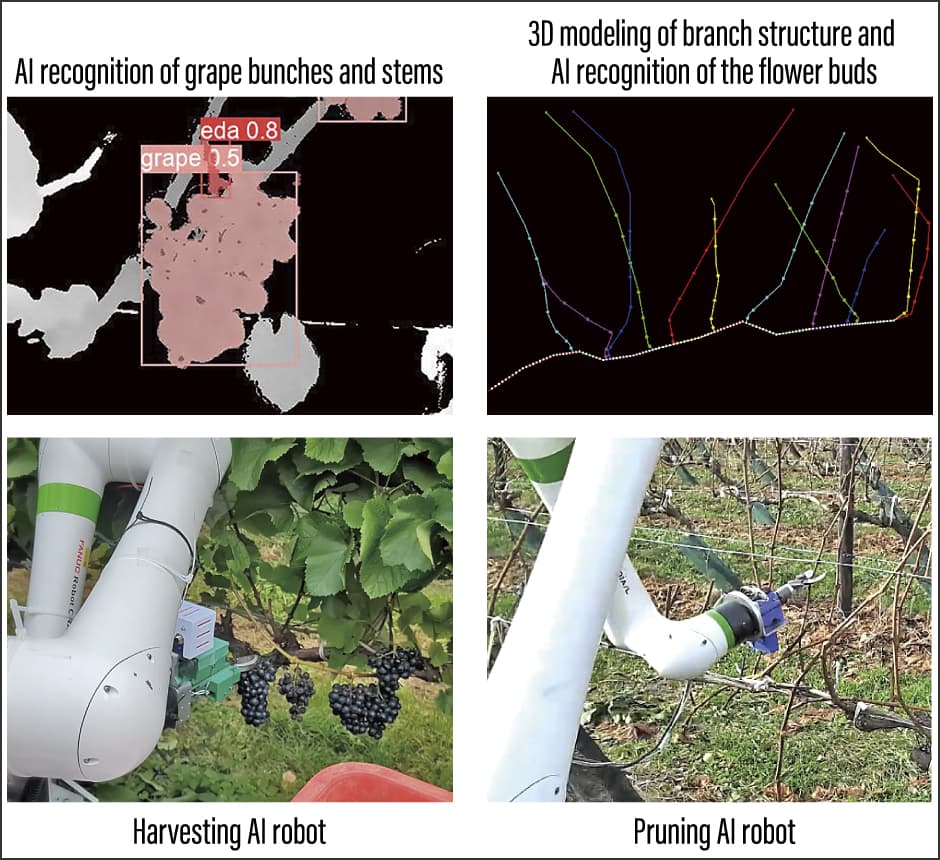
Figure 3. Grape harvesting AI robot and pruning AI robotThe harvesting AI robot on the lower left uses advanced sensors to measure the sugar content and acidity of the grapes and harvests the appropriate fruit. The pruning AI robot on the lower right recognizes flower buds from 3D point cloud data and determines the position at which to prune the branch before carrying out the work.
In fruit tree production, the task of pruning is very important. As pruning takes place immediately after harvesting, it is very demanding work; for instance, in some regions, it has to be carried out in the snow. Research into using robots to carry out this task is also progressing (Figure 3). First, the structure of the fruit tree is estimated from 3D point cloud data and flower buds are detected. Then the position at which the branch is to be pruned is determined from the number of buds on the branch and their positions. However, unfortunately, the success rate for pruning is currently only 65%. The challenge is to improve the success rate and speed up the process.
With the aim of ensuring environmental sustainability, the EU has been promoting an agricultural policy called the Farm to Fork Strategy since 2020. This policy aims to reduce the quantity of chemical pesticides used by 50% by 2030, and to expand organic farming to encompass 25% of agricultural land across the EU as a whole. Following this example, Japan has set a target of halving the quantity of chemical pesticides used by 2050 and converting a quarter of Japan’s approximately 4 million ha of agricultural land to organic farming.
To achieve these goals, research and development is taking place, aimed at using small robots to carry out ultra-precision farming work. To enable seeds to germinate in fields, the soil needs to be loosened. At present, the entire field is plowed, but pinpoint plowing uses small robotic agricultural machinery to plow only the area where seeds will be sown. If seeds are sown and their locations recorded using GNSS, robots will be able to accurately identify the places where the seeds were sown, so subsequent fertilization, pesticide application, and weeding will only need to be carried out in those places. Right now, fertilizer inevitably has to be applied to the entire field, while pesticides also have to be spread across a wide area. This means that a huge amount of work is required, along with large quantities of fertilizer and pesticides. Smart agriculture will enable us to reduce all of these. Weed eradication also takes a great deal of effort, placing a tremendous burden on farmers, but it will become possible to carry out even this work just by letting a machine run. Although it is technically difficult to avoid crops and remove only the weeds around them, we have made significant progress.
No match for the tacit knowledge of skilled farmers
As described above, cyberspace and physical space will be integrated in Society 5.0. In line with this, progress is also being made with simulations on virtual farms. These involve robotic agricultural machinery simulating tasks on virtual farms in cyberspace that have been created by mapping farms in physical space. Virtual farms make it possible to use in cyberspace agricultural machinery that has the same functions and weight settings as the real machines to determine which types and how many robots would be most efficient, without transporting the machinery to the actual farm. For example, one can simulate using seven agricultural machines to determine whether they can turn properly without colliding with each other. In this way, the user can decide on the optimal operational methods and put them into practice on farms in physical space.
We created a virtual farm of a large rice paddy in the Kitamura district of Iwamizawa, Hokkaido, and used it to carry out simulations. When creating a virtual farm, the first thing we have to do is use drones to survey the physical farm; surveying this rice paddy of approximately 2.2 ha took just an hour and a half. The margin of error was within 5 cm. On this virtual farm, we also simulated cooperative work carried out by multiple robotic agricultural machines (Figure 4). Having three machines working cooperatively can reduce the time taken to carry out the work to 36% of the time taken by a single machine working alone. That figure falls to 23% with five cooperative machines, 19% with seven, and 18% with nine. After obtaining the results of such operations, we decide what is the optimal number of machines for cooperative work. In addition, we use remote sensing and forecasted values for parameters such as temperature (daily average, daily maximum, and daily minimum), daily cumulative rainfall, and hours of sunlight to simulate crop growth conditions. This enables us to forecast the yield and timing of harvest, and to formulate work and sales plans.
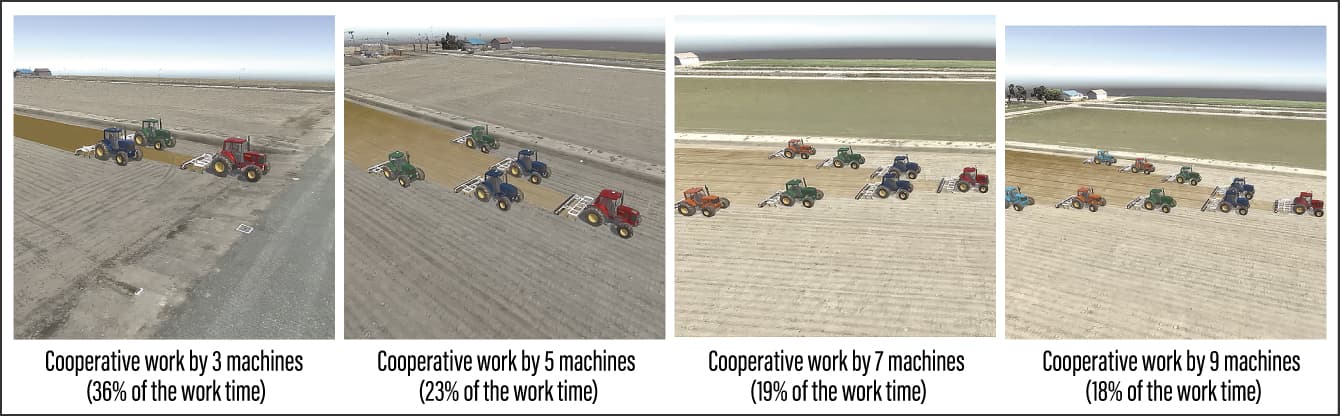
Figure 4. Cooperative work by robotic agricultural machinery on a virtual farmA simulation of cooperative work on a virtual farm was conducted to determine the optimal number of machines needed for maximum efficiency. Carrying out simulations before deploying agricultural machinery to farms in physical space will reduce waste.
When seeking to implement this kind of smart agriculture in practice, a key challenge is the fact that procuring agricultural machinery is a major endeavor. Basically, we are undertaking research and development based on the premise of technologies used by service providers. Farmers will seek the support of such providers to produce agricultural crops.
It would be fair to describe smart agriculture as data-driven agriculture. It involves converting the know-how of skilled farmers into data, but it is not the case that all their skills can be incorporated. Farmers use the best methods to produce crops, based on tacit knowledge —— knowledge that they cannot readily explain orally. Tacit knowledge cannot be expressed in numerical terms, and the data held by smart agriculture cannot surpass the tacit knowledge of skilled farmers who have worked the land for 30 or 40 years. However, making full use of data enables even less experienced individuals to get their agricultural operations on track within a shorter period than was possible before, and it is also possible to reduce the burden of labor, thanks to robotic agricultural machinery. It is anticipated that smart agriculture will help to address the shortage of farmers by lowering the barriers to entry for new farmers.
(Figures courtesy of Noboru Noguchi)