スマート農業はロボットやAI、IoTなど先端技術を活用し、高度に分析された農業データを基に省力化、効率化、高品質生産、環境負荷低減などを目指す新しい農業で、2000年代に一般に知られるようになった。以降さまざまに進化し、現在は、農場の仮想空間「バーチャルファーム」上でロボット農機などの遠隔監視・操縦を行う実証実験が進んでいる。生育状況をシミュレーションすることで収穫時期や収穫量などが予測でき、作業計画の最適化が図れるため、将来の農業として期待される。
特集 農業革命 進化するスマート農業——仮想空間で行う「農作業」
構成/菊地武顕

北海道大学大学院農学研究院長・大学院農学院長・農学部長
野口 伸(のぐち・のぼる)
1985年、北海道大学農学部農業工学科卒業。1990年、同大大学院農学研究科博士後期課程修了。同大農学部助手、同大大学院農学研究科助教授を経て、2004年に同大大学院農学研究院教授。2023年から現職。
モノのインターネット(Internet of Things:IoT)やAIなどのテクノロジーを用いた「スマート農業」が注目されています。その特徴は3点あります。まず自動化・ロボット化を進めることで、人手不足の解消や重労働からの解放が可能になります。次いでデータを活用することで、農業技術の継承を容易にしたり、リスク管理の高度化や生産管理の最適化を実現します。最後に、超精密作業をすることで、農薬・化学肥料使用量の削減と生産の低コスト化といった環境と食料生産の持続性にも貢献できます。
AIによるビッグデータの解析
人類の社会は、①狩猟社会→②農耕社会→③工業社会→④情報社会と進んできました。現代はSociety4.0と呼ばれる情報社会ですが、将来のSociety5.0は、サイバー空間(仮想空間)とフィジカル空間(現実空間)が融合し、すべての人とモノがつながり知識や情報が共有化されるといわれています。農耕は1万2000年も前からずっとフィジカル空間でのみ行われてきました。しかしSociety5.0におけるスマート農業では、集積したビッグデータをサイバー空間でAIを用いて解析し、それをフィジカル空間で生かしていくことになります。
具体的にはまず、Global Navigation Satellite System(GNSS、アメリカのGPSなど衛星測位システムの総称)を用いた農機の自動化・ロボット化が挙げられます(図1)。そのレベル1として、GNSSを利用したオートステアリング機能を搭載したトラクタが登場しました。このトラクタでは人が操縦席に座る必要がありますが、手放し運転ができます。つまり操縦する技術のない人でも、搭乗するだけで動かして農作業ができるのです。既にアメリカでは約80%の農家がレベル1のトラクタを利用しています。次の段階であるレベル2では、自動走行機能を持つロボット農機、つまり無人で走り耕すトラクタ等が導入されます。2018年には、世界に先駆けて日本のメーカーがロボットトラクタの市販を始めました。人が農機に乗る必要はなく、近くで作業を監視すればいいのです。あるいは前に無人機、後ろに有人機(その逆でも可)という2台編成にして、前の農機が耕運をし、後ろの農機が種を蒔いたり、肥料を撒くという協調作業をすることもできます。つまり1人で2台の農機を動かすことが可能なのです。

図1 ロボット農機の技術レベルレベル1は自動操縦だが人が乗る必要があった。無人で走行・作業をするレベル2に進化した後、遠隔監視・操縦するレベル3の開発研究が進んでいる。
とはいえ、1人で2台ではまだ不十分。そこでレベル3として、遠隔監視・操縦が可能なロボット農機の開発を進めています。ロボット農機の監視・操縦は、農場から離れた場所に設置された監視室で行います(図2)。私たちは北海道大学のスマート農業教育研究センターに監視室を設置して、最大6台のロボット農機を遠隔で監視して同時に作業を行うことに成功しています。作業する圃場は、600~700㎞離れた所にもありましたが、それだけ離れた場所での農作業を、遠隔監視の下、完全自動で行うことができました。

図2 4台のロボット農機の遠隔監視の様子北海道大学の遠隔監視室で4つの圃場の作業を監視中。上下2台のモニタ-にロボット農機の周辺映像と前方映像が映し出される。中央は地理情報システムで、ロボット農機の速度や作業状況を監視する。
障害物の存在や距離を検出・推定
遠隔監視ロボット農機の最重要課題は、安全性の確保です。そこで農機の前方と後方に2台のフルHDカメラを搭載し、監視室に送られてきた映像から前方・後方の障害物をAIが自動認識してロボット農機を減速・緊急停止できるようになっています。情報のやり取りのためには、従来のインターネットでは対応が難しいこともあります。ネット環境が混雑した場合には映像送信の遅延が発生するからです。実際3秒ほど遅れることもあり、その場合は監視室では3秒前の映像をAIが分析することになります。そういった事態を防ぐために低遅延な高速大容量通信が必須となるので、レベル3のロボット農機開発には通信会社も一緒に参加しています。
さらに映像遅延を考慮して、監視室でのAIと人間による監視だけではなく、農機自体にも障害物の検出と衝突回避のための機能を搭載します。農機には2Dライダーと呼ばれるレーザーを使ったセンサーが設置され、センサーが捉えた情報から障害物の存在ならびに障害物までの距離を検出し、アラームを鳴らしたり、農機を緊急停止させる機能を備えています。 また無人のロボット農機が公道を走るという点については、法的な整備が進められています。既に公道実証実験の結果を踏まえて申請が出され、今後は圃場間や格納庫と圃場の移動について都道府県公安委員会の特定自動運行の許可が出る見通しです。
実際の農作業では、ロボット農機が防風林の下などを走る必要もあります。その場合はGNSSが使えません。あるいは狭い農道で他の農機や軽トラックの脇をすり抜けるときなど、自動運転では困難な場合もあります。そういったときはすぐに自動運転から遠隔操縦による運転に切り替えるようにしています。監視室には農機と連動して運転できるハンドル等が備えられ、モニター画面に映し出される映像を見ながら操縦するのです。遠隔操縦については、大阪・関西万博でその成果を発表する機会を得ました。万博会場と北大の農地をつなぎ、万博会場からの遠隔操縦で約1200㎞離れた北大のロボット農機を操縦してもらいました。ロボット農機に遠隔監視・操縦システムを導入することで、農業の効率は飛躍的に上がります。実証実験では、労働時間を69%、生産コストを16%減らせ、利益改善効果が25%向上しました。
スマート農業は、米作だけでなく果樹・野菜栽培でも進められています。まずセンサーを搭載したドローンを用いて情報を収集します。週に1回の頻度で、生育モデリング、病虫害発生予察検知、果樹・野菜の位置推定を行うのです。その情報をAIが解析し、管理作業を最適化。最も良い収穫時期を予測し、予測収穫量マップの作製を行います。そのうえでロボット農機が収穫・搬出を担います。
遠隔監視・操縦のロボット農機が収穫を行う
私たちがカボチャを使って行っている試験の畑では、コリンキー、おいとけ栗たん、えびすという3種のカボチャの種をランダムに蒔き、それぞれが成長をしています。その畑にドローンを飛ばしてデータを収集。検出アルゴリズムにのっとってAIが解析し、このカボチャはコリンキー、これはおいとけ栗たん、これはえびすと種類ごとに識別をするのです。その適合率は90%を超えます。そのうえでAIは品質・収穫量を推定し、適切な出荷計画の立案を手助けしてくれます。
ご存じのようにカボチャは重いので、収穫に際して多くの人間が必要となります。また収穫量も実際に採ってみないと分からないので、搬出においてどれだけのトラックが必要かも分かりません。収穫日にならないと収穫量が分からない現状では、積載を効率的に進めることは難しいのです。スマート化によって収穫量がきちんと予測できれば、搬送が効率化します。それにより経費を抑えることができるだけでなく、トラックが排出する二酸化炭素も削減することから地球環境への負荷も軽減されるのです。
実際の収穫は、遠隔監視・操縦のロボット農機が行います。カボチャのある位置はドローンが収集したデータを基に正確に分かるので、目視の必要はありません。つまり夜間の収穫が可能です。ただし収穫作業自体は、現時点ではカボチャを1つ取り上げるのにもかなりの時間を要します。また、つるに絡まって失敗することもあります。そこで収穫しそびれたカボチャは、それがどこにあるのか位置を記録し、翌日に人が畑に入って収穫をすることになります。
北海道の浦臼町や石川県の穴水町では、ワイン用ブドウ栽培のスマート化の実験を進めています。ブドウ収穫において大切なのは、その実がワイン造りにふさわしい糖度と酸度を持っていて採り頃であるか否かの判断です。人が収穫する場合は目で見たうえで、ブドウの粒をなめてみることで決めます。スマート農業ではAIが視覚情報に基づいて判断します(図3)。人間が見える光の波長は一般的に380〜780nmの範囲ですが、高度なセンサーを用いれば、それを超える1500nmくらいの領域も調べられ、可視光では分からない糖度と酸度の情報を取得できます。
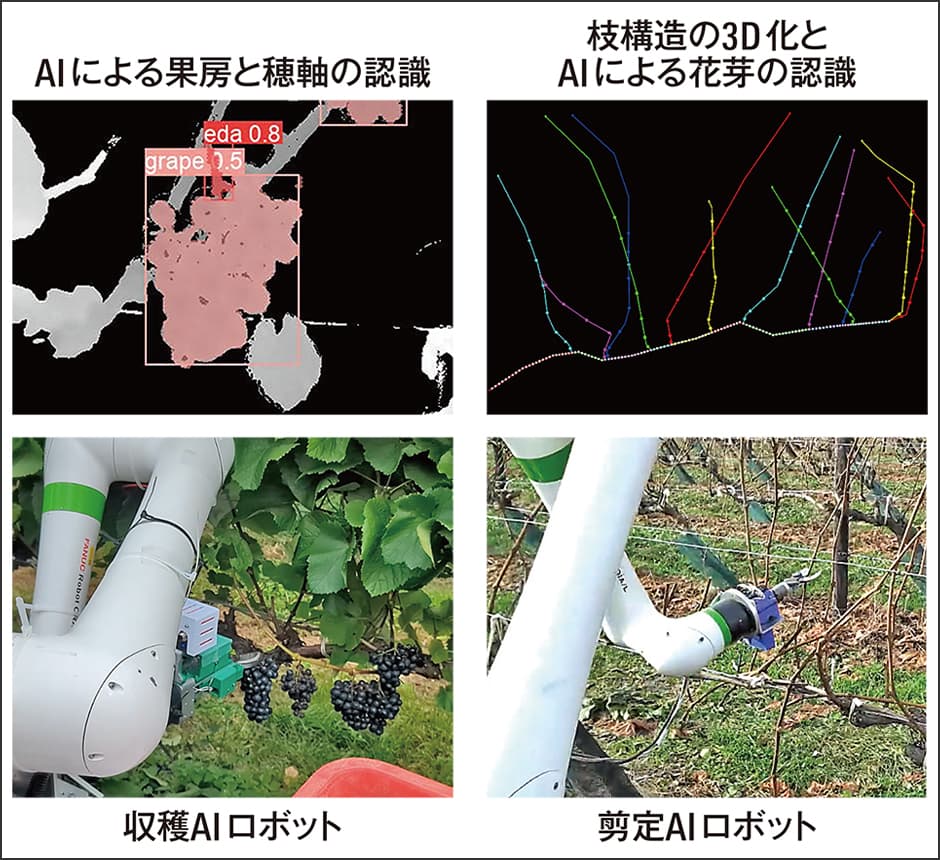
図3 ブドウの収穫AIロボットと剪定AIロボット左下の収穫AIロボットは、高度なセンサーを用いてブドウの糖度と酸度を測定し、適切な実を収穫する。右下の剪定AIロボットは3D点群データから花芽を認識し、剪定位置を決定して作業を行う。
果樹の生産においては、剪定作業が非常に重要です。剪定時期は収穫直後なので、地域によっては雪の中で行うなど、とても厳しい作業です。これをロボットを用いて行う研究も進んでいます(図3)。まず3D点群データから果樹構造を推定し、花芽を検出。枝元からの花芽の数と位置から剪定位置を決定して切っていくのです。ただし残念なことに、現在の剪定成功率は65%。この成功率の向上と高速化が課題となっています。
環境の持続を目的として、EUでは2020年より「ファーム・トゥ・フォーク戦略」という農業政策が推し進められています。2030年には化学農薬の使用量を50%減らし、有機農業をEUすべての農地の25%にまで拡大させるというものです。日本もそれに倣うように、2050年までに化学農薬の使用量を50%減らしたうえで、約400万haある農地の4分の1、つまり100万haを有機農業とするという目標を立てました。
その実現のため、小型ロボットを用いた超精密作業についても研究開発が進んでいます。畑では種が発芽できるように、土壌を膨軟にする必要があります。現在は畑全面を耕しますが、小型ロボット農機を使って種を蒔く所のみを耕す“ピンポイント耕運”を行うのです。GNSSで記録しながら種を蒔けば、ロボットは種を蒔いた場所を正確に把握できますから、その後の施肥作業、農薬散布、除草作業は、その場所にのみ行えばいいのです。今はどうしても畑全般に肥料を与え、農薬も広い範囲に散布しなければなりません。そのために膨大な作業が必要となり、使われる肥料や農薬も多い。スマート化によりそれらを減らすことができます。また除草は大変手間がかかり農家の負担は非常に大きいのですが、機械を走らせるだけでそれが可能になるのです。作物をよけてそれ以外の草を除くことは技術的に難しいのですが、だいぶ進歩してきました。
熟練生産者の「暗黙知」には及ばないが
先述のように、Society5.0ではサイバー空間とフィジカル空間の融合が行われます。それにのっとる形で、「バーチャルファーム」でのシミュレーションも進めています。フィジカル空間にある農場を写像(マッピング)したサイバー空間上のバーチャルファームで、ロボット農機を用いた作業を行う。つまりシミュレーションをするのです。実際の農場に農機を運ばなくても、サイバー空間上で実物と同じ機能、同じ重量に設定した農機を用いて、どういうロボット農機を使えばいいのか、何台使用するのが効率的かを考察できます。例えば7台の農機を使用してみて、それらがぶつかることなくきちんとターンできるかなどをシミュレーションするのです。そうして最適な作業方法を決定し、フィジカル空間の農場で実践します。
私たちは北海道岩見沢北村地区の大規模水田のバーチャルファームを作製し、その上でシミュレーションを行いました。バーチャルファームを作製するにはまずはドローンで測量をするのですが、約2.2haの水田の測量は1時間半ほどで終了。誤差は5㎝以内でした。そのバーチャルファームで、複数のロボット農機の協調作業のシミュレーションもしてみました(図4)。3台協調で行うと、作業時間が1台で作業したときの36%に減らせます。5台協調なら23%、7台協調で19%、9台協調なら18%に減らせます。そうした作業結果を得たうえで、何台のロボット農機で協調作業をさせるのが最適かを決定します。また、気温(⽇平均、日最⾼、⽇最低)、日積算降⽔量、日照時間などの、予報値入力とリモートセンシングによって、作物の生育状態もシミュレーションします。これによって収穫時期や収穫量が予測でき、作業計画や販売計画を立てることができます。

図4 バーチャルファームにおけるロボット農機の協調作業どれだけの数のロボット農機を用いれば最も合理的な農作業ができるか、バーチャルファーム上で協調作業のシミュレーションを行う。フィジカル空間の農場に農機を持っていく前に行うことで、無駄を省ける。
実際にこのようなスマート農業を実現させようとすると、農機の調達が大掛かりなものとなることが課題です。基本的にはサービス事業者が使う技術という前提で研究開発を進めています。農業従事者は事業者の手を借りて農作物の生産を行うことになります。
スマート農業は、データ駆動型農業といえます。熟練した生産者の持つノウハウをデータ化させていただくのですが、その技術をすべて採り入れられるわけではありません。生産者は、口ではうまく説明できない知識、いわば暗黙知にのっとって最良の方法で生産をしています。暗黙知は数値化できず、スマート農業の持つデータは、その土地で30年・40年と働く熟練の生産者の暗黙知には勝てません。しかしデータを駆使することで、経験の浅い人でもこれまでより短い期間で農業を軌道に乗せることができますし、ロボット農機のおかげで労働負担を減らせます。新規参入のハードルが低くなることで、農業従事者の人手不足解消に役立つことが期待されます。
(図版提供:野口 伸)